
新研究!通過神經訊號控制義肢有了更多的可能性
- [news.knowing.asia]通過神經訊號來幫助殘障人士(本文特指下肢截肢人士)控制義肢的設想,又多了一些可能性。......
通過神經訊號來幫助殘障人士(本文特指下肢截肢人士)控制義肢的設想,又多了一些可能性。
近日研究人員發現,在物理療法的幫助下,實驗對象利用神經控制方法,完成的動作數量超乎科學家們之前的想像。
在發現這個現象之前,該研究團隊一直在開發下半身外骨骼,用於幫助殘障人士行走。
不過,他們所開發的設備本質上是可行走機器人,殘障人士可將其綁在腿上,然後進行移動。
通常來說,這些外骨骼(可行走機器人)可以自動執行諸如步行之類的預編程循環運動。
如果在幫助殘疾人士進行更複雜的活動,研究人員希望殘障人士能夠通過思想來控制這些設備,例如,依賴附著在腿部的感測器來實現,這些感測器可以檢測從大腦發送到肌肉的生物電訊好,並發出移動的指令。
當然了,目前看來,上述操作還屬於一種理想狀態。
北卡羅萊納州立大學生物醫學工程師、該研究的資深作者Helen Huang表示:「完成走路這樣簡單的動作而言,機器進行自主控制的效果會很好,但如果涉及到的動作不僅僅是走路,比如打網球或即興舞蹈時,能夠有神經控制的幫助就好了。」
不過,目前由腦部訊號來實現對機器人義肢的控制,還存在需要解決的問題,其中就包括如何幫助殘障人士的神經系統,去啟動和控制他們仍然留存在肢體中的肌肉。
「在(截肢)手術過程中,肌肉的原始結構發生了變化。」Helen Huang 進一步解釋說,「我們發現,啟動這些殘留的肌肉相對簡單,但是它們收縮的方式與身體健全的人不同,因此殘疾人士需要接受訓練,從而學會如何更好地控制這些肌肉。」
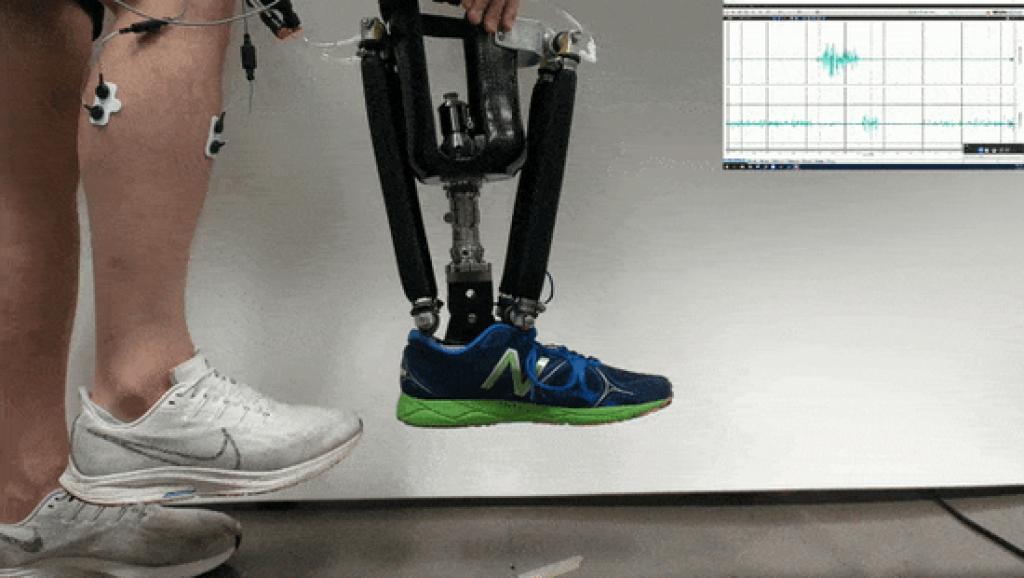
在這項新研究中,Helen Huang和同事為一名截肢志願者,在物理治療師的指導下,練習使用神經控制來做動力義肢踝關節的訓練,這種訓練對於義肢來說是極具挑戰性的。因為義肢需要從控制踝關節運動的肌肉,來接收生物電訊號。
這位57歲的志願者失去了左小腿中部以下的肢體,包括腳踝。
他在兩個半星期的時間內,與物理治療師進行了五次練習,每次練習持續約兩個小時。而物理治療師會幫助志願者提供有關關節活動的回饋,並且在關節運動練習之後,幫助志願者進行全身運動和全身協調。
在通過培訓後,志願者就可以做出他以前認為困難的各種動作,其中包括在不借助外力的情況下,從端坐到站立的動作或是蹲著撿地面的某樣東西。
此外,畢竟腿部佩戴義肢機器人的截肢者站立時通常穩定性較差,因為機器很難預測外界干擾,也很難預測截肢者會用何種方式來彌補這種干擾。
北卡羅萊納州立大學生物醫學工程師,該研究的第一作者Aaron Fleming說:「站立時所呈現的穩定性,以及對動作的微妙控制都令人驚訝。」
眼下,研究人員的目標是對更多的機器人義肢的患者進行檢查,並幫助他們進行更多的任務(例如避開障礙物)測試。他們還想調查當這些志願者身處這樣的訓練中,神經系統可能在做什麼,比如是否正在恢復原始的神經通路。
資料來源: news.knowing.asia
網址: 原文網址
作者: 伍文靚 / 何渝婷
 行走機器人,殘障人士,實驗,神經控制
行走機器人,殘障人士,實驗,神經控制
Previous 一度被政府視為「亂搞」!世界級中風復健戰鬥營,3個月,病人躺著進去走著出來 Next 【天人永隔】太太患癌離世9歲罕見病兒猝死 爸爸飲泣:我的心像被掏空